Всем привет! Это четвёртая статья о моём конвейерном принтере, в которой я буду описывать свой опыт перехода на прошивку Клиппер и некоторые другие изменения в конструкции.
Пройдя все вышестоящие этапы, я подобрался к следующему логичному шагу – смене управляющей электроники и прошивки.
Штатно на принтере установлена плата MKS Gen-L v2.1 с восьмибитным процессором, что по современным меркам принтерострояния уже анахронизм. Да и Марлин не может похвастаться полноценной поддержкой современных технологий улучшения качества печати (вроде того же Input Shaping) и скоростью внедрения обновлений.
С клиппером я уже знаком, ранее я применял его на двух других своих принтерах – дельте Tevo Little Monster и Кубике.
Опыт сугубо положительный – система стабильная, предсказуемая, конфигурируется легко и удобно. С этим проблем не ожидается.
Другая часть задачи – переделать кронштейн крепления вентиляторов печатающей головы, чтобы улучшить охлаждения термобарьера и добиться равномерного двухстороннего обдува печатаемой детали. Сюда же – упрочнение крепления податчика струны, т.к. взятая мной с Thingiverse моделька оказалась недостаточно крепкой.
Ну и «на сладкое» - переделка балки оси Y, которую я планирую сменить на карбон, ради некоторого облегчения подвижной части печатающей системы, что положительно сказывается на доступных ускорениях. Ну и потому, что просто могу. Прикольно же!
Итак, за работу. В смысле – за моделирование. Прежде чем лезть в «кишки» принтера хорошо бы в подробностях отрисовать новые детали.
Замеряю размеры и положение отверстий на тех частях рамы, с которыми мне предстоит стыковаться и сажусь рисовать.
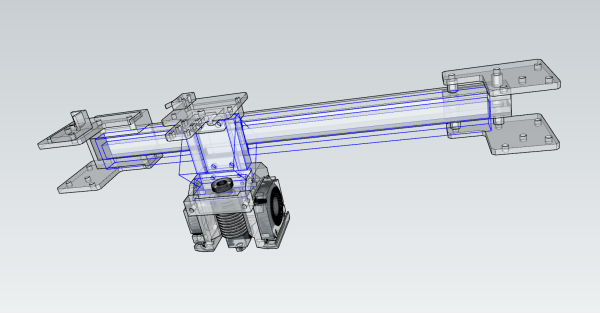
В итоге получается что-то такое:
От штатной системы остаётся рельса с кареткой, узел натяжения ремней, кронштейн под радиатор термобарьера и основная крепежная пластина головы. Её тоже можно было бы заменить на карбон, но тогда я почему-то об этом не подумал.
На скриншотах уже финальная версия – в процессе примерки некоторых деталей были найдены небольшие ошибки, которые я исправлял в модели, перепечатывал и снова примерял.
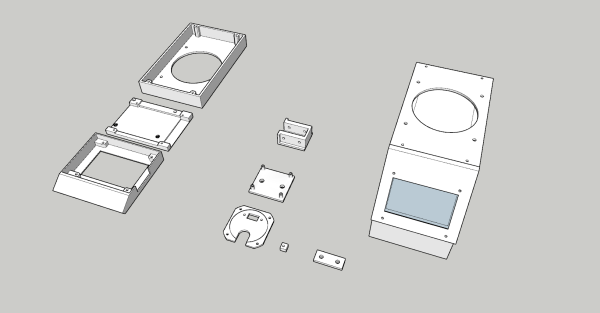
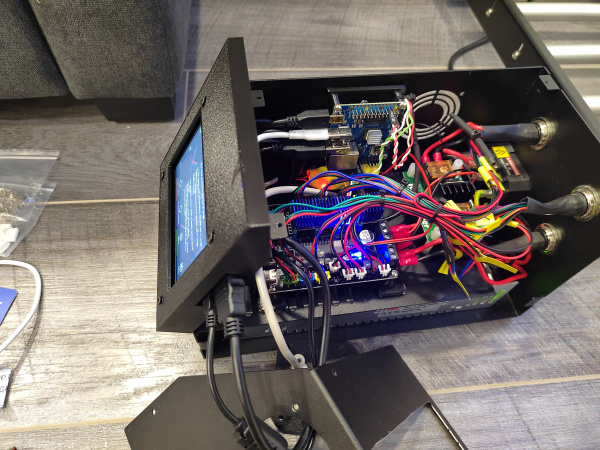
Так же я смоделировал накладки на корпус управляющей электроники, в которых будет размещен тачскрин и 120мм вентилятор охлаждения. Меня так достал шум от двух мелких кулеров (40 и 60мм), что это переделка обдува контроллера была обязательной частью обновления принтера.
С корпуса я и начал.
С экраном печатные детали состыковались хорошо, а вот с верхней накладкой я слегка накосячил – не сошлись крепежные отверстия, что было тут же исправлено в модели и отправлено на перепечатку.
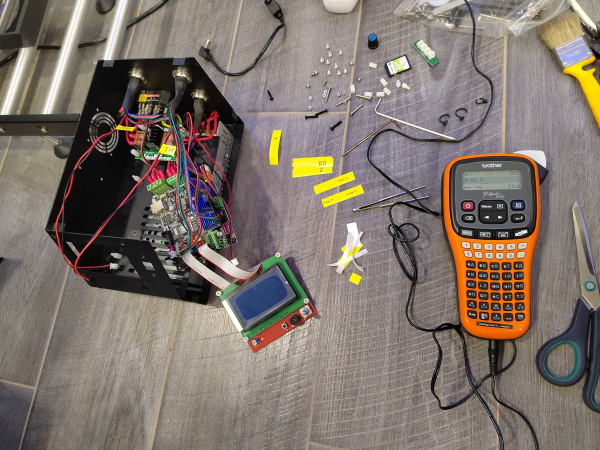
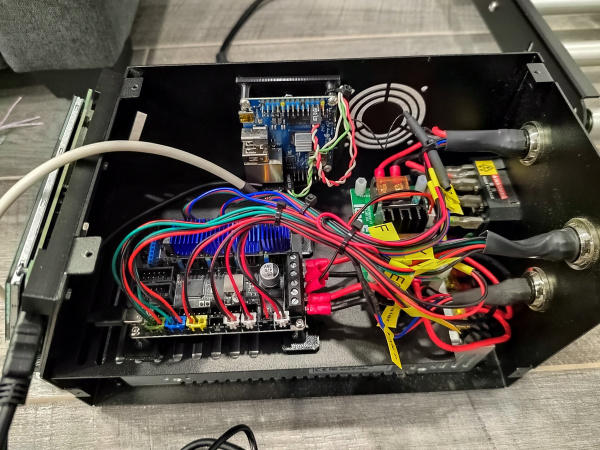
А пока исправленная модель печаталась – я разобрал корпус и взялся за маркировку проводов.
Провод за проводом всё было помечено.
Теперь можно устанавливать новую плату и подключать провода уже к ней.
Т.к. в корпусе места не то, чтобы очень много (а мне еще нужно уместить одноплатник для Клипера) я искал что-то компактное, но имеющее все нужные функции.
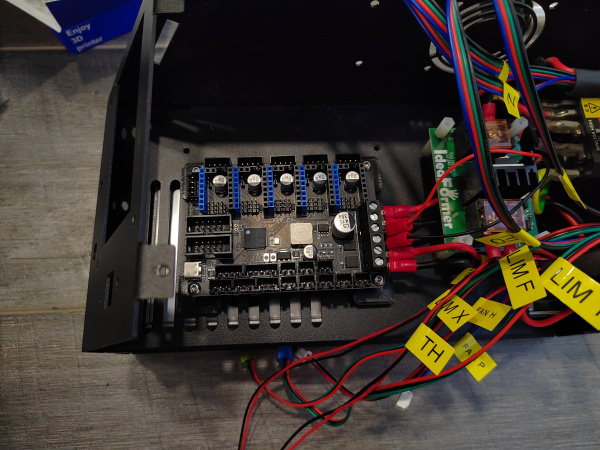
В конце концов выбор пал на Mellow Fly-D5.
К числу её достоинств можно отнести малый размер, встроенный CAN-адаптер (на будущее) и удачное для меня расположение разъёмов.
Выставив джамперы драйверов в соответствии с документацией я перешел к подключение проводов.
На мою удачу их длины хватило для достаточно удобного размещения в доступном объёме, разве что пришлось сделать два маленьких изменения:
1) Удлинить провод подключения обдува печатаемой детали
2) Подключить нагреватели стола и печатающей головы крест-накрест.
Без второго пункта можно было обойтись, но так провода ложились аккуратнее.
Теперь дело за хостом Клиппера. На других своих принтерах я использовал одноплатный компьютер Orange Pi 3 LTS, но тут для него слишком мало места.
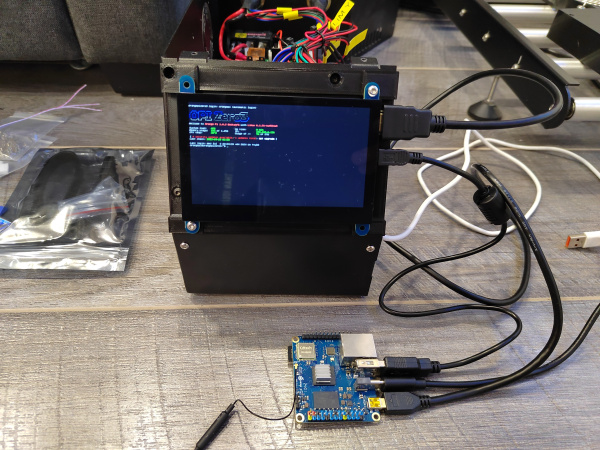
Посмотрев доступные варианты, я остановился на Orange Pi Zero 3, у которого есть парочка важных плюсов – компактный размер и сосредоточенные на одной стороне разъёмы подключения периферии.
К минусам можно отнести отсутствие EMMC, вместо которой придётся использовать MicroSD карточку.
На флэшке экономить явно не стоит, так что я поискал что-нибудь устойчивое к большому количество записи и выбрал SanDisk Max Endurance на 32Гб.
Экран выбирался исходя из размеров фронтальной панели корпуса, так что пришлось взять достаточно маленький (по сравнению с другими принтерами) HDMI тачскрин на 4.3”
Экран подключается двумя кабелями: HDMI <> MicroHDMI для передачи изображения и MicroUSB <> USB для подачи питания и сенсорного управления.
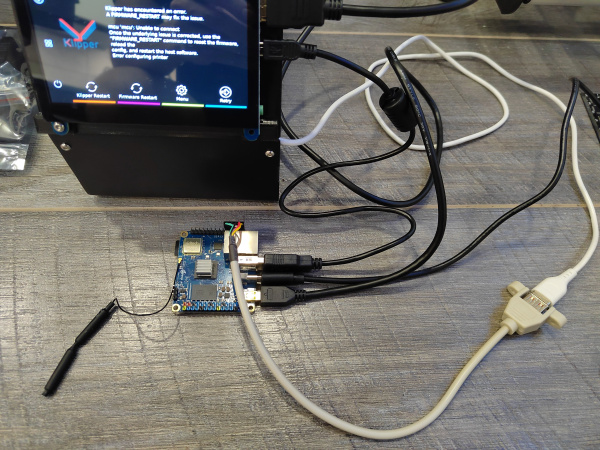
Кстати, о USB. На Orange Pi Zero 3 три доступных USB порта – один распаянный, а два других выведены на контакты гребёнки.
На какие именно – написано в документации.
Я использую все три – в распаянный порт подключается экран, один порт гребёнки занят платой управления принтером, а другой выведен на панель через шнурок с разъёмом. Он будет использоваться для подключения внешней периферии – акселерометра или веб-камеры. Шнурок нужно перепиновать в соответствии с положением контактов на гребёнке.
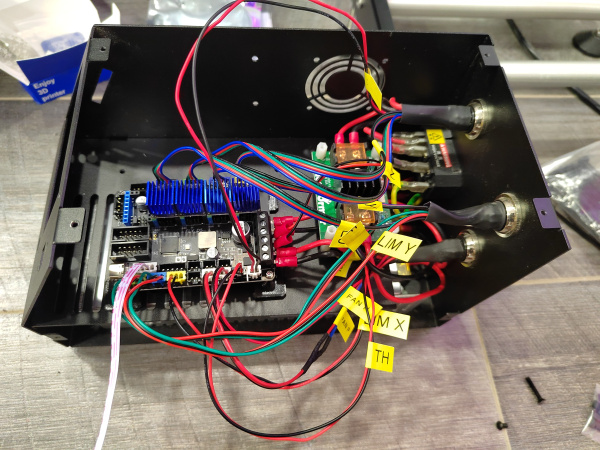
После установки OS, Клиппера и первичной настройки я засунул «апельсинку» в корпус, определив её на место платки-разветвителя вентиляторов, ранее крепившейся на боковой стенке.
В этой статье установка системы остаётся «за кадром». Если для вас это в новинку – обратитесь к Klipper Wiki где есть примеры установки и подключения для разных плат.
С размещением электроники закончил, теперь пора пошуметь. В смысле, вырезать в корпусе отверстия для вывода проводов и кулера на 120мм.
Нацарапав примерные линия отреза, я взялся за дремель и минут сорок колупал верхнюю крышку корпуса.
Сглаживаю края наждачкой, чищу от пыли, примеряю.
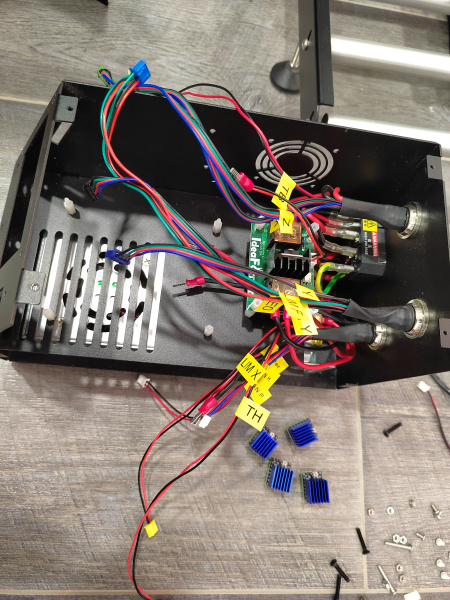
В глубине проводов можно разглядеть желтый прямоугольник, слегка подсвеченный красным светодиодом. Это регулируемый понижающий DC-DC преобразователь LM2596, которым я получаю 5в для питания одноплатного компьютера.
К нему питание идёт с одного из разъёмов неуправляемых вентиляторов платы Fly-D5, а от него (белым проводом с USB Type-C) в Orange Pi Zero 3.
Второй такой же преобразователь используется для регулировки напряжения питания 120-го кулера, закреплённого на верхней накладке корпуса. К этому времени её исправленная версия как раз допечаталась.
Немного корректирую настройки слайсера и запускаю тестовый кубик, чтобы проверить, что всё корректно работает и не сбоит во время печати.
С первой задачей всё – принтер переведён на Клиппер и может печатать. Правда, само по себе это особого выигрыша (кроме повышения удобства за счет онлайн доступа) не даёт.
Двигаюсь дальше – теперь нужно перебрать «голову».
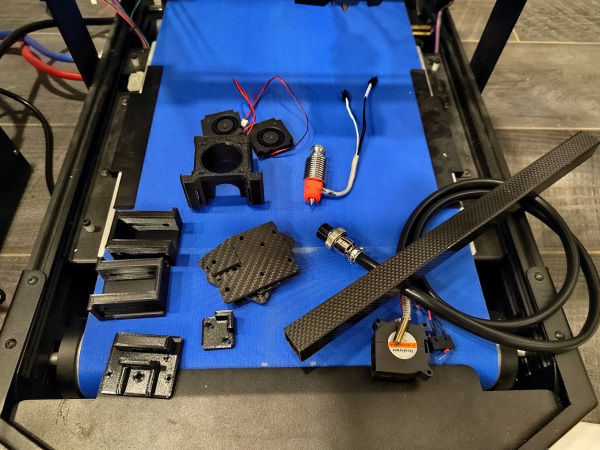
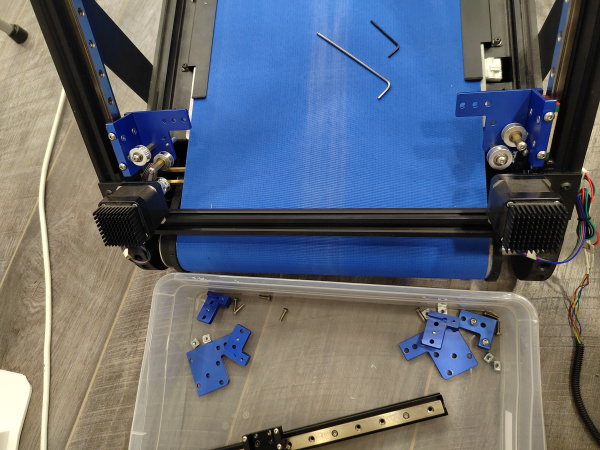
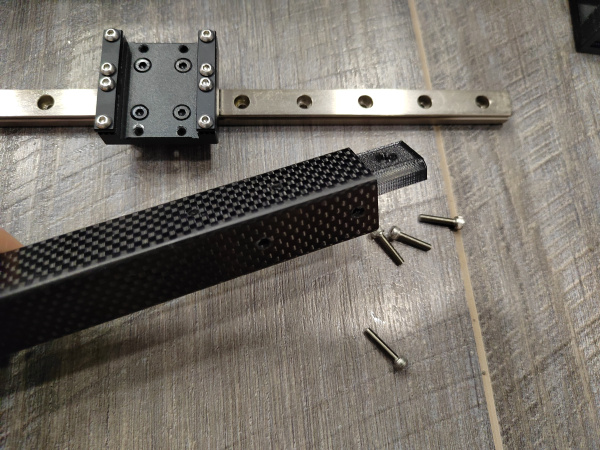
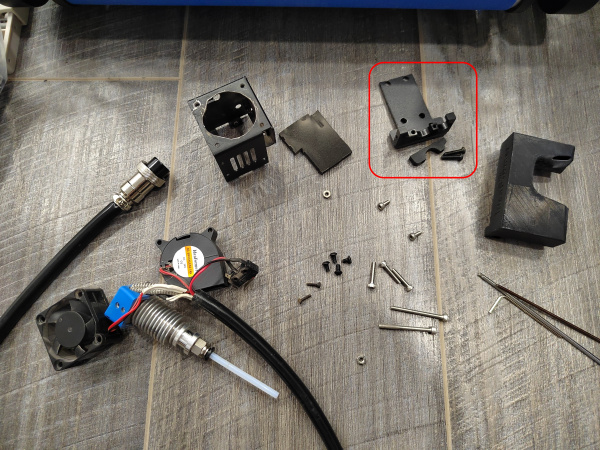
На фото представлены новые печатные детали балки, держатель для податчика и кронштейн вентиляторов охлаждения. Карбоновый профиль для портала (330мм), карбоновые пластины для его крепления. Жертвенный кабель для подключения новой головы (остался со времён покупки заводского «директа») и новый хотенд.
О последнем чуть подробнее: тут уже привычная для меня сборка из радиатора E3D v6, биметаллического горла «титан-медь» и керамического нагревателя TriangleLab CHC. Сопло родное – латунь с никелевым покрытием.
Радиатор, конечно, несколько архаичный по современным меркам, но дешевый и хорошо справляется с теплоотводом за счет обширного оребрения.
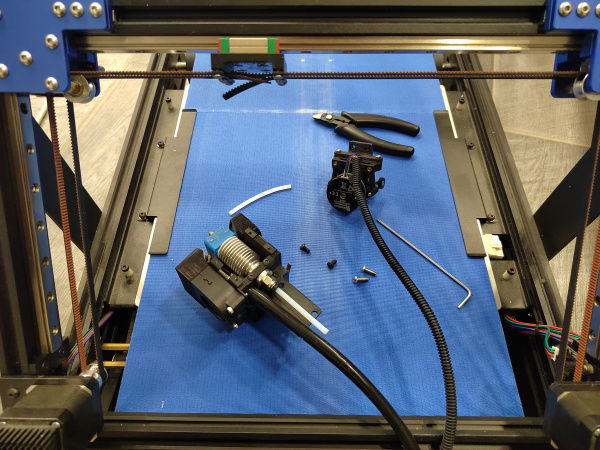
Разворачиваю принтер обратной стороной и берусь за работу.
Первым делом отмечаю маркером позицию крепления ремней, чтобы потом было на что ориентироваться при возвращении их на место.
Откручиваю и откладываю голову – с ней разберёмся позже.
Снимаю ремни, проверяю плавность хода портала на родных комплектующих. Это нужно для понимания не перетянул ли я что-нибудь при установке новых деталей.
Поочерёдно откручиваю крепления балки, раскладывая снятые детали на «левые» и «правые».
В случае неудачи с карбоном так будет проще вернуться к изначальной конструкции.
Отдельно фотографирую положение роликов натяжения ремня.
Снимаю ролики и оставшиеся пластины.
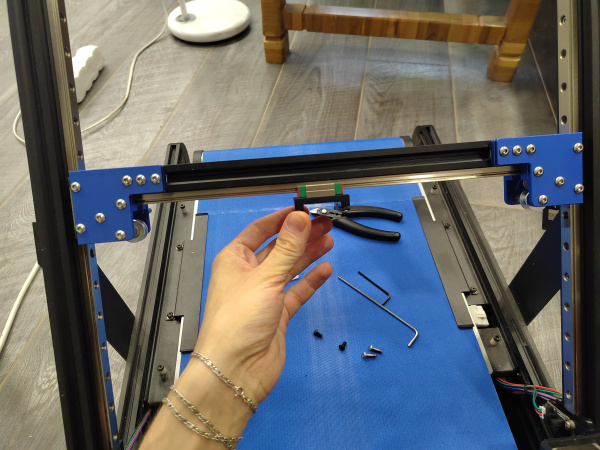
Теперь, когда все детали балки откручены, можно прикинуть разницу в весе:
И она, прямо скажем, невелика т.к. основной вес даёт алюминиевый профиль, а он достаточно короткий. На принтере с порталом большего размера разница была бы ощутимее.
Не то, чтобы я ожидал какого-то фантастического выигрыша от такого облегчения конструкции, но всё-таки. Мне вообще было скорее интересно попробовать – смогу ли я приделать новую балку с достаточной точностью, чтобы это всё вообще заработало.
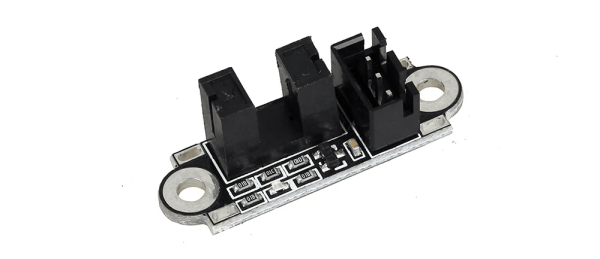
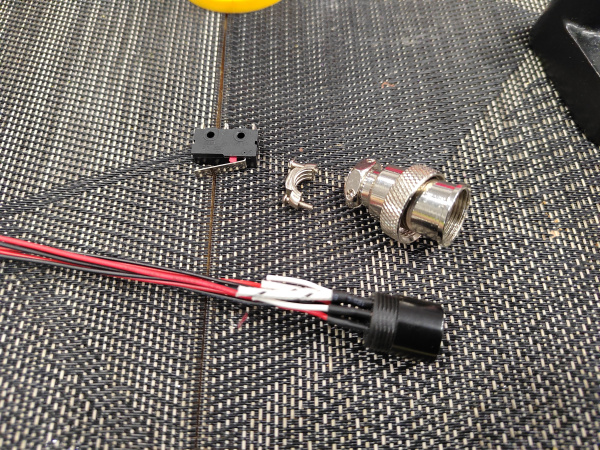
Кстати, о точности – пока сняты ремни, я имею доступ к оптическому концевику оси Y, который давно планировал сменить. Штатно установлен LERDGE Optical Endstop-4001, и он достаточно хреновый т.к. имеет непростительную для оптики повторяемость, к тому же зависящую от скорости парковки.
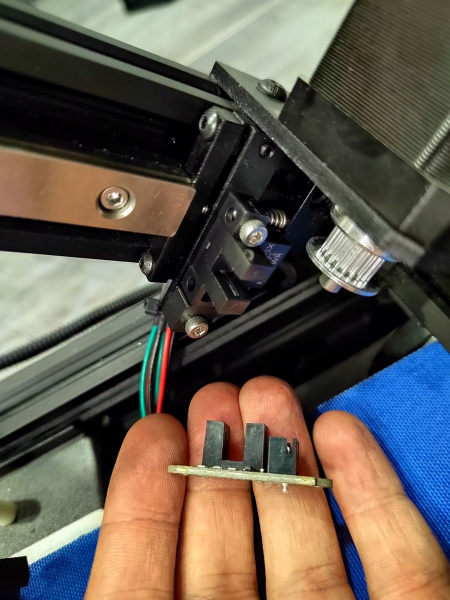
Меняю его на EE-SX671WR
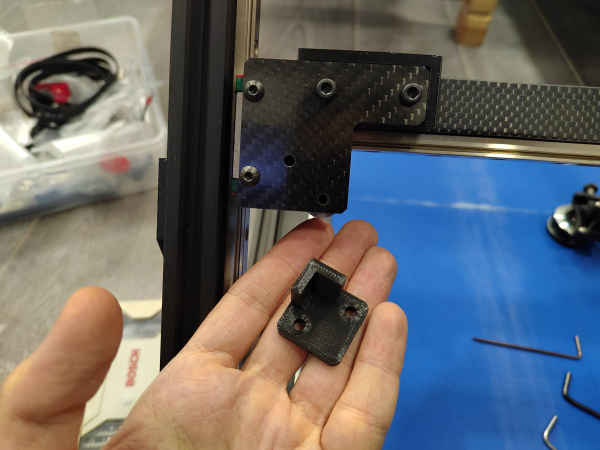
Новый концевик имеет другие посадочные размеры, так что я фиксирую его одним болтом, а с другой стороны поджимаю печатной деталькой (чтобы он не мог провернуться на оси).
«А чего это вы тут делаете?»
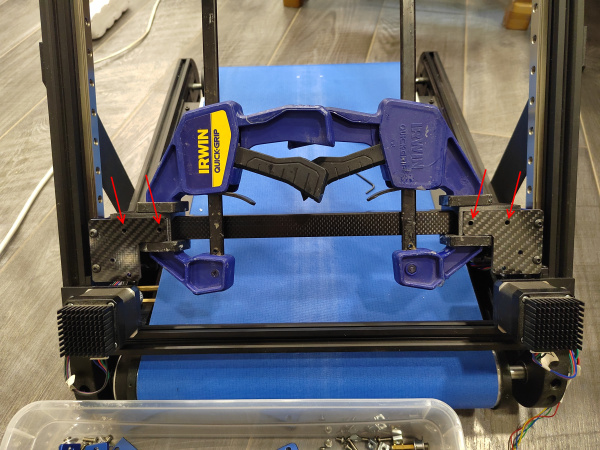
Готовлюсь к сборке портала – прикручиваю углепластиковые обкладки и фиксирую балку портала струбцинами. Теперь нужно аккуратно просверлить балку через указанные отверстия сверлом 4мм с обоих сторон. Желательно, чтобы кто-нибудь помог, направляя шланг пылесоса под точку сверления т.к. свои руки будут заняты удержанием портала и шуруповёрта.
Обратную установку портала начинаю с роликов. С моими новыми деталями расстояние между пластинами увеличилось на 4мм от штатного, так что мне нужно добавить какие-нибудь проставки для компенсации размеров.
Самый простой вариант – добавить на каждую сторону по шайбе толщиной 2мм из чего-нибудь плотного. Для этого хорошо подходят стойки для печатных плат М4х2.
Правда в магазине радиодеталей удачно нашлись латунные стойки М4х22, так что шайба будет только со стороны ролика.
Болты аналогично заменяются на более длинные.
Прикручиваю пару новых карбоновых обкладок и ставлю на них обводные ролики, сверяясь с ранее сделанным фото.
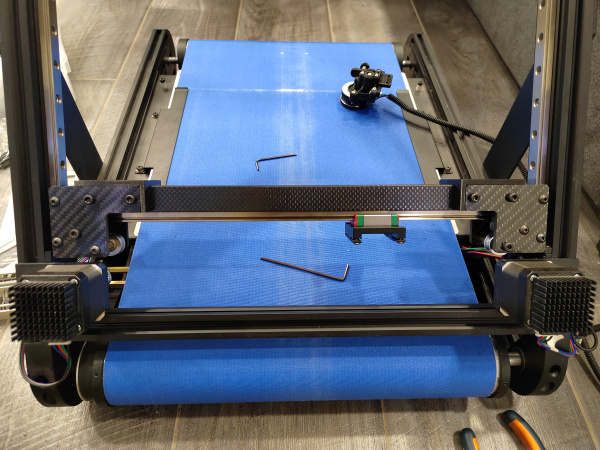
Балка фиксируется четырьмя болтами М4х50, проходящими в просверленные ранее отверстия.
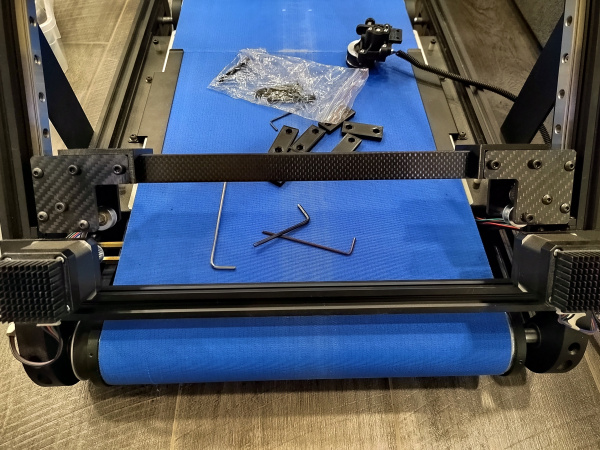
На фото она установлена временно – для проверки соосности сверления. Сейчас я её снова сниму для сверления под рельс линейного подшипника.
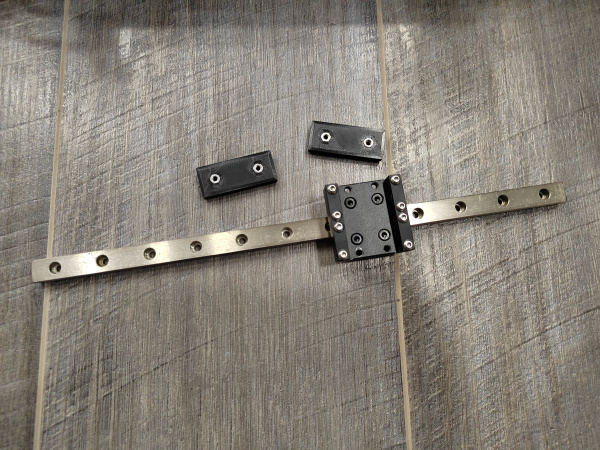
Направляющая будет закреплена двумя закладными, вставленными внутрь углепластикового квадрата.
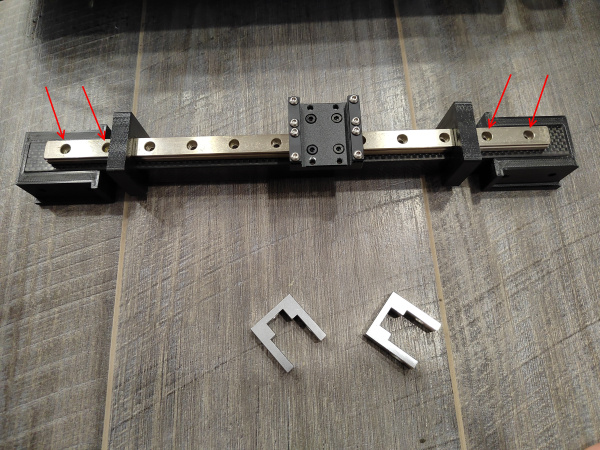
Выставляю рельс на балке с помощью печатных кондукторов. Изначально думал использовать алюминиевые, но из-за гуляющих размеров карбона они не налезли.
Делаю четыре отверстия сверлом 3.2мм и вставляю закладные с запрессованными гайками М3.
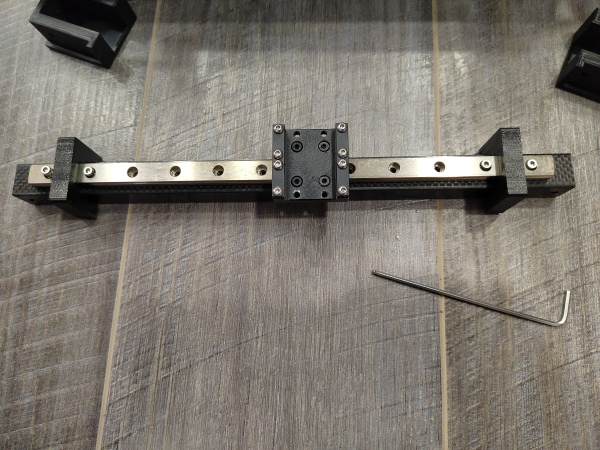
Прикручиваю рельс …
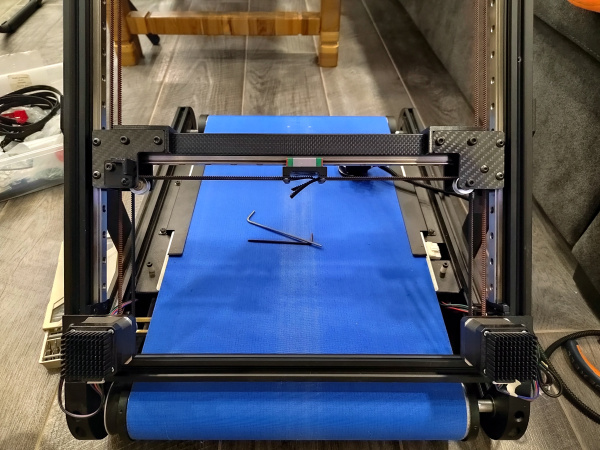
… и устанавливаю всё это великолепие на место.
О, чуть не забыл! До натяжения ремней нужно прикрутить упор для механического концевика оси X т.к. он ставится на те же болты, что и обводные ролики.
Вот теперь можно возвращать ремни.
Крепление у них красивое и надёжное, только не очень удобное т.к. приходится натягивать два ремня сразу из-за общей крепёжной планки. В теории, её можно распилить на две половинки и устанавливать ремни независимо, но я не стал.
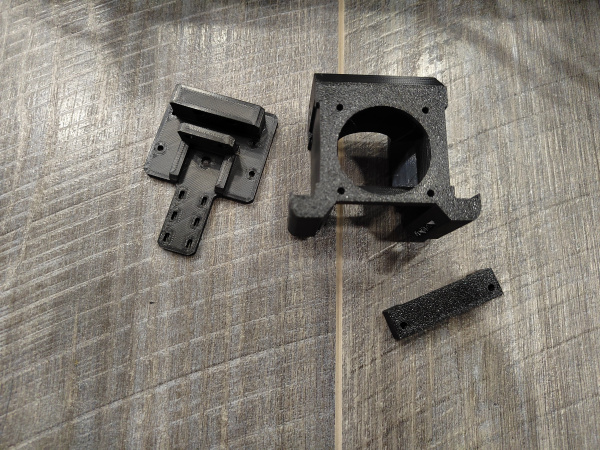
Портал готов, перехожу к «голове».
Из её деталей мне нужна основная крепежная планка и кронштейн радиатора, остальное откладываю в сторону.
Примеряю планку к напечатанной детали – всё сходится хорошо, разве что одно из крепежных отверстий я нарисовал не в том месте (оно оказалось несимметрично своей паре с другой стороны).
Исправляю в модели и двигаюсь дальше.
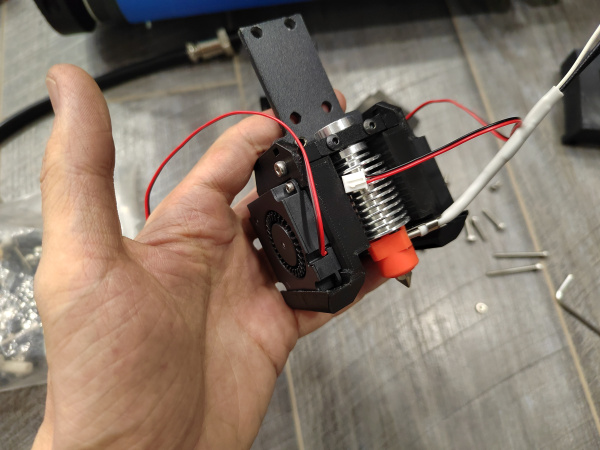
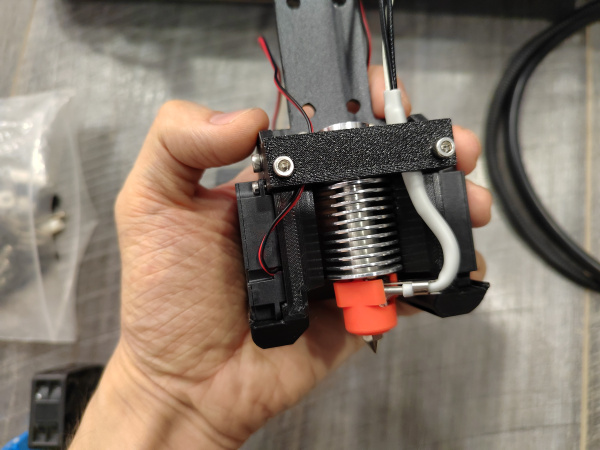
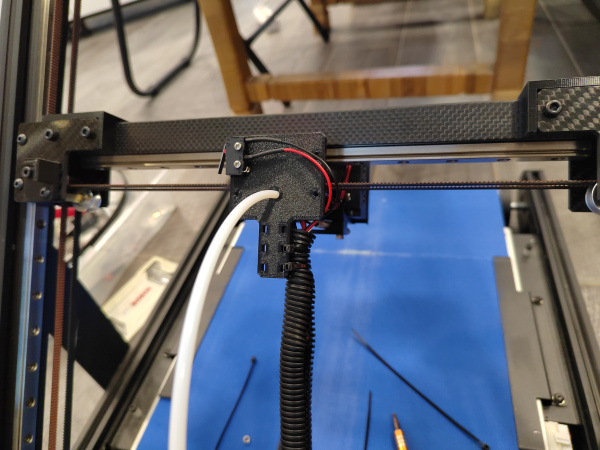
Прикручиваю хотенд и временно ставлю голову на принтер.
Ага, хорошо. Зазор между краем напечатанной детали и столом получился даже больше, чем я предполагал – это позволяет немного сместить выходные отверстия обдува ближе к соплу.
А еще становится видно, что мне нужно какое-то крепление для провода нагревателя, иначе он может за что-нибудь зацепиться.
Вношу коррективы в модель и печатаю новую версию.
Теперь всё в порядке.
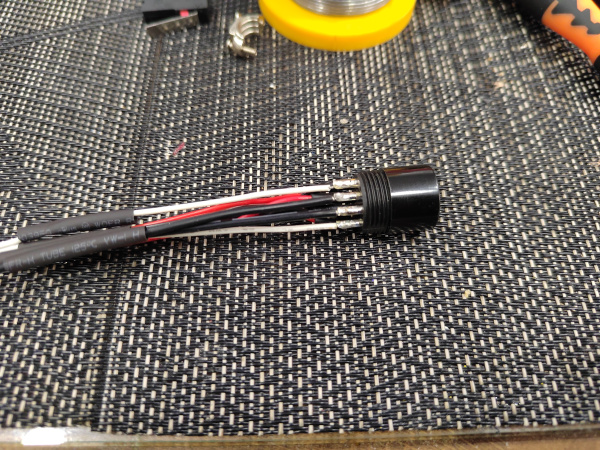
Берусь за провода. Откусываю концевик, нагреватель, термистор и вентилятор охлаждения с жертвенного кабеля, после чего снимаю силиконовый шланг и разбираю разъём.
Убираю обрубки проводов нагревателя и датчика температуры, припаивая на их место удлинители из комплекта TriangleLab CHC.
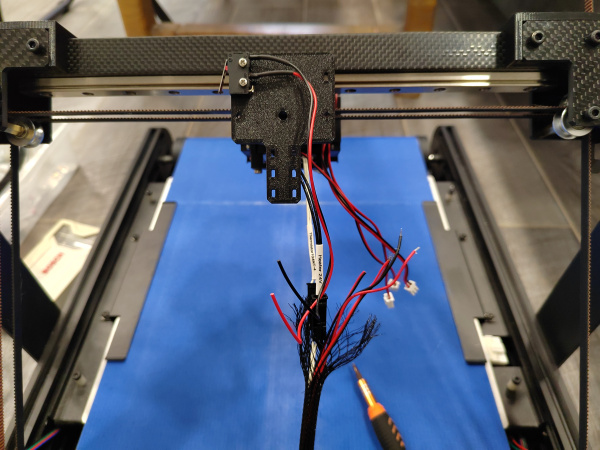
Ставлю «голову» на место и приступаю к сращиванию проводов.
Силиконовый шланг заменяется на сетчатую оплётку – она мне нравится больше, да и выглядит прикольно.
Правда, отрезать её нужно не «в размер» а с запасом, о чём я постоянно забываю.
Закончив с проводами, я до упора пропихиваю кусок PTFE трубки, которая будет направлять филамент от податчика к хотенду.
Обрезаю, оставляя примерно 6мм выступающими над платформой податчика, и прикручиваю «шерпу».
Т.к. я снова ошибся с размером куска сетчатой оплётки, прячу остатки проводов в разрезную гофру. Выглядит это стрёмно, да еще и торцом слегка цепляет алюминиевый профиль рамы. Гадость.
Перетягиваю оплётку, перемещая недостаток к разъёму подключения блока управления.
И всё, сборка завершена. Ну, почти.
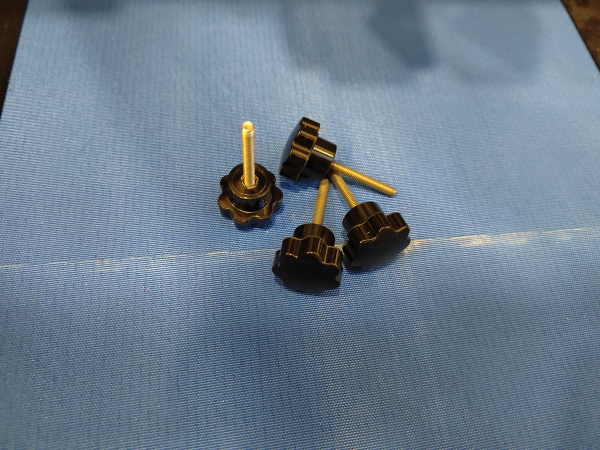
Тут я вспоминаю, что у меня еще аж со времён покупки принтера лежат новые барашки регулировки стола, которые были повреждены при доставке. Вот и их время настало.
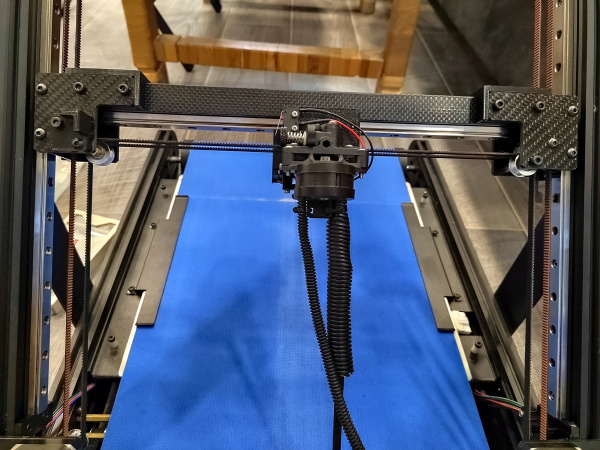
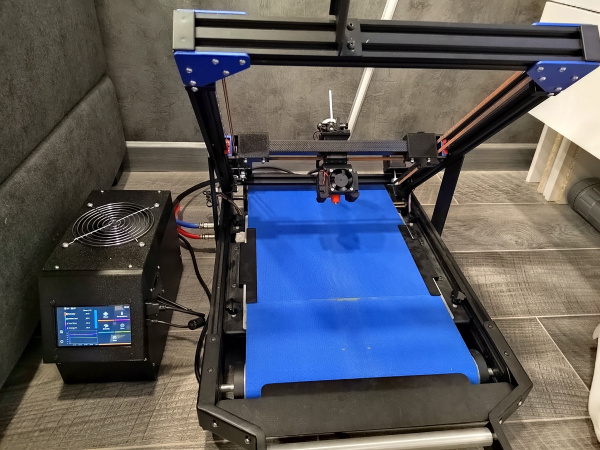
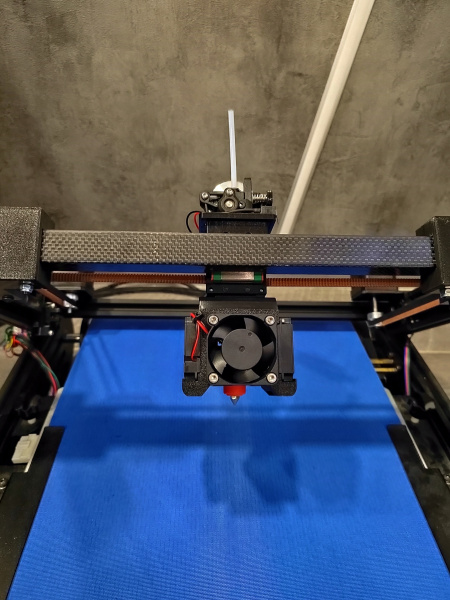
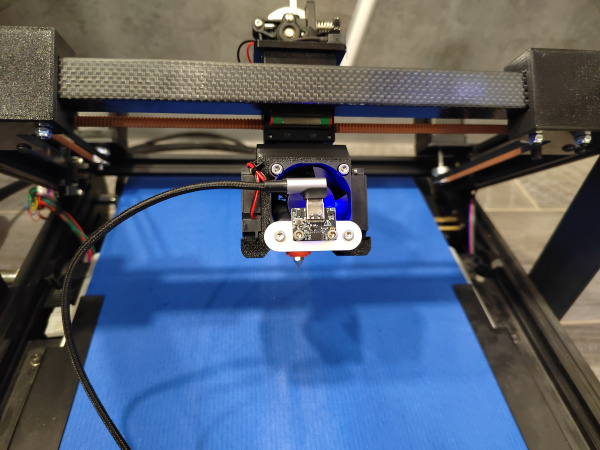
Теперь точно всё. Общий вид:
Голова отдельно:
Теперь у меня и обдув равномерный и сопло видно замечательно.
Переходим к самому «вкусному» - калибровке компенсации резонансов.
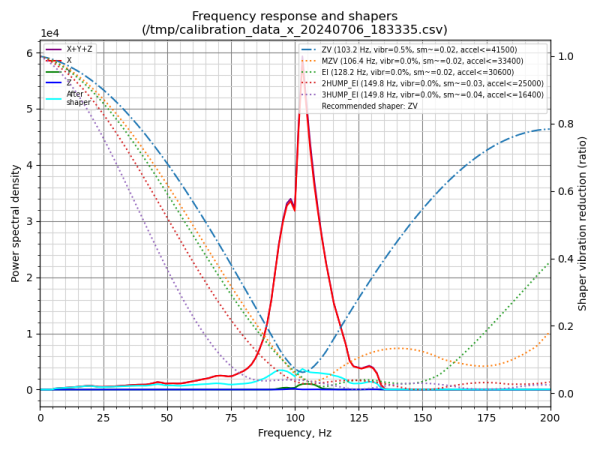
Вешаю датчик Mellow Fly-ADXL345 на «голову» и запускаю SHAPER_CALIBRATE
По Х картина относительно неплохая …
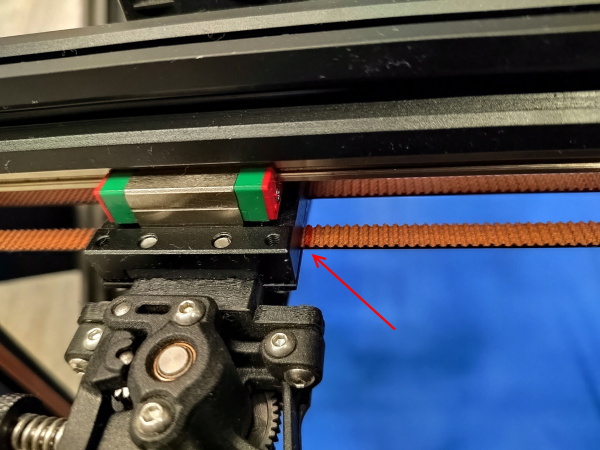
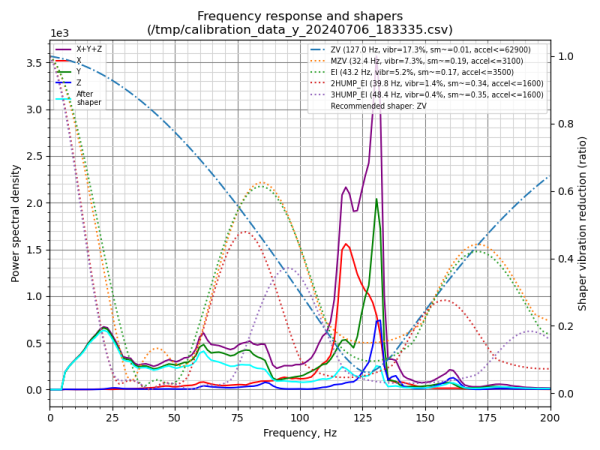
А вот на оси Y много мусора, что, как мне кажется, связано с некоторым заметным люфтом каретки MGN12C.
Надо бы попробовать её заменить и посмотреть не изменится ли чего. Кажется, у меня была запасная от KGT.
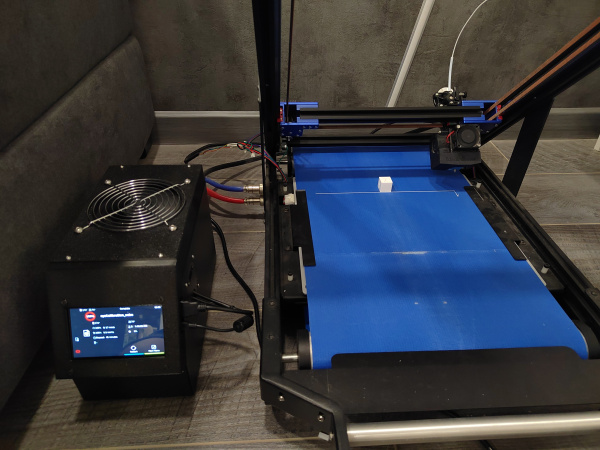
Последний штрих – проверка длительной печатью (перед которой, разумеется, калибруется PID стола и хотенда).
Корректирую настройки скорости в слайсере, нахожу катушку с остатками белого PETG и запускаю печататься прямоугольник 20х10х500.
Всё ОК – температуры «апельсина», платы управления и хотенда стабильны.
Напоследок еще раз перечислю использованные комплектующие:
# Override to support unlimited belt size
# (homing Z simply resets its virtual position to 0.0)
[homing_override]
axes: z
set_position_z: 0
gcode:
{% if params.X is not defined and params.Y is not defined and params.Z is not defined %}G28 X0 Y0{% endif %}
{% if params.X is defined %}G28 X0{% endif %}
{% if params.Y is defined %}G28 Y0{% endif %}
G92 Z0